The Future of Mobility: How Brain-Computer Interfaces are Restoring Motor Function
Introduction
For centuries, spinal cord injuries and neurodegenerative diseases have been viewed as permanent, life-altering conditions that strip individuals of their autonomy. However, we are currently witnessing a technological shift that is fundamentally rewriting this narrative. Brain-Computer Interfaces (BCIs) are moving from the realm of science fiction into clinical reality, offering a bridge between the intention to move and the physical execution of that motion.
By bypassing damaged neural pathways, BCIs allow the human brain to communicate directly with external hardware—such as robotic limbs or exoskeletons. This is not merely about “assistive technology”; it is about restoring the fundamental human right of agency. For those living with paralysis, this technology represents the transition from being a passive observer of their own body to an active participant in their physical environment.
Key Concepts
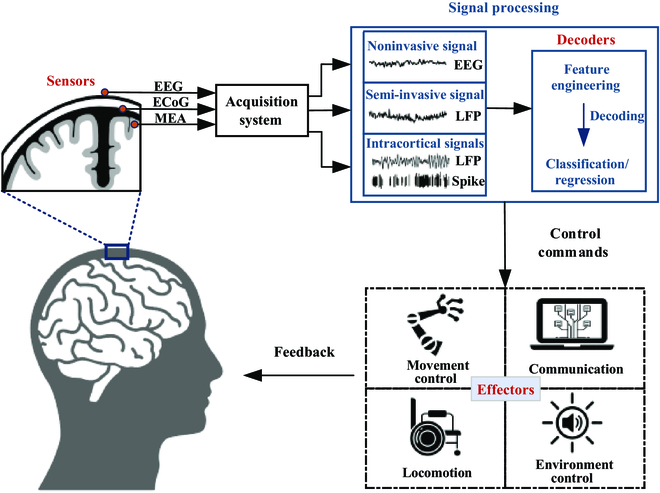
At its core, a Brain-Computer Interface is a system that acquires brain signals, analyzes them, and translates them into commands for an output device. To understand how this restores motor function, we must look at the three pillars of BCI technology:
1. Neural Signal Acquisition
The human brain communicates via electrical impulses. BCIs use sensors—either non-invasive (like EEG caps) or invasive (implanted electrode arrays)—to detect the firing patterns of neurons in the motor cortex. The motor cortex is the region of the brain responsible for planning and executing voluntary movements.
2. Signal Decoding
Raw neural data is noisy and complex. Advanced machine learning algorithms are employed to “decode” these signals. Essentially, the software learns to associate specific patterns of neural activity with specific intended movements, such as “grasping” or “reaching forward.”
3. The Effector (Robotic Limb)
Once the intention is decoded, the system sends a digital signal to a robotic limb or an exoskeleton. The device interprets the signal and triggers the necessary motors to execute the movement. This creates a closed-loop system where the brain’s intent is translated into physical action in near real-time.
Step-by-Step Guide: How the Integration Process Works
Neural Mapping: Before a user can control a robotic limb, the BCI system must be calibrated. The user performs “imagined movements”—thinking about moving their hand or arm—while the system maps which neural patterns correspond to which physical actions.
Implant Integration: In clinical applications for full motor restoration, a micro-electrode array is surgically implanted into the motor cortex. This provides a high-fidelity signal that is significantly more accurate than external sensors.
Decoding Software Training: Using machine learning, the software undergoes an iterative training process. The system refines its ability to filter out background neural noise, focusing specifically on the signals associated with motor intent.
Real-Time Execution: Once trained, the user initiates movement through thought. The BCI hardware processes the signal, transmits it to the robotic limb, and the device moves.
Sensory Feedback Loops: Advanced systems now include haptic feedback. Sensors on the robotic limb detect pressure or touch and send electrical signals back to the brain, allowing the user to “feel” what they are touching, which is essential for fine motor control.
Examples and Case Studies
“In a landmark study, a participant with tetraplegia was able to use a robotic arm to pick up a cup and drink from it independently. By using a BCI, the user was able to bypass the spinal cord injury and achieve fluid, multi-joint movement that had been impossible for years.”
Another compelling application is the use of Brain-Controlled Exoskeletons. Unlike a single robotic arm, an exoskeleton supports the entire body. In recent trials, individuals with lower-limb paralysis have been able to stand and walk by syncing their brain activity with a wearable robotic suit. This not only restores mobility but also provides significant secondary health benefits, such as improved cardiovascular function and reduced bone density loss associated with long-term sedentary living.
Common Mistakes in BCI Implementation
Overestimating “Plug-and-Play” Capabilities: A common misconception is that BCIs work instantly. In reality, the brain must go through a period of neuroplasticity, learning how to “speak” to the computer effectively. The technology requires patience and dedicated training.
Ignoring Signal Degradation: Biological tissue is hostile to electronics. Over time, the body may develop scar tissue around implanted electrodes, which can weaken the signal. Current research is focusing on biocompatible materials to mitigate this issue.
Underestimating Cognitive Load: Controlling a robotic limb with the brain is mentally taxing. Early users often report high levels of fatigue because the brain is working overtime to maintain focus on movements that were once subconscious.
Advanced Tips
For those interested in the future of BCI integration, the focus is shifting toward Shared Control Architectures. Instead of the brain doing 100% of the work, the robotic limb is programmed with “intelligence” to assist. For example, if a user thinks about reaching for a cup, the robotic limb uses its own sensors to automatically adjust its grip based on the cup’s size and weight. This reduces the mental effort required by the user.
Additionally, researchers are exploring Non-Invasive High-Density EEG. While invasive implants offer the best precision, new high-density arrays are narrowing the gap, potentially allowing for motor restoration without the need for neurosurgery.
Lastly, consider the role of Artificial Intelligence (AI) in decoding. Future BCI systems will likely incorporate Large Language Models (LLMs) and predictive modeling to anticipate user intent, essentially “guessing” the next step in a movement sequence to make the motion feel more natural and fluid.
Conclusion
Brain-Computer Interfaces represent the final frontier of physical medicine. We are moving toward a future where paralysis is no longer a permanent barrier to movement but a technical challenge that can be overcome with neural-digital synchronization.
While we are still in the early stages of clinical adoption, the trajectory is clear. As decoding algorithms become more refined, hardware becomes more lightweight, and our understanding of neuroplasticity deepens, the ability to restore full motor function will become a standard reality. The integration of the human mind with robotic systems is not just an engineering feat; it is a profound restoration of human dignity and independence.